frog
Designing Robots
for Human Spaces
A human-centered approach to how physical AI shows up, behaves and collaborates

Service and Offer
Sector
Studio
A new era of robotics
As physical AI accelerates across industries, intelligence is moving off screens and into the physical world. At frog, we asked ourselves: What technologies do we want to live with? And how should they appear in our spaces?
This new era introduces AI with presence, technologies that occupy space, sense and respond to their surroundings, and participate in human routines. Advances in hardware now give robots movement, perception and form, while AI enables adaptability, natural communication and intelligent behavior in unpredictable environments. When AI enters human spaces, the rules change. Capability alone no longer determines success.
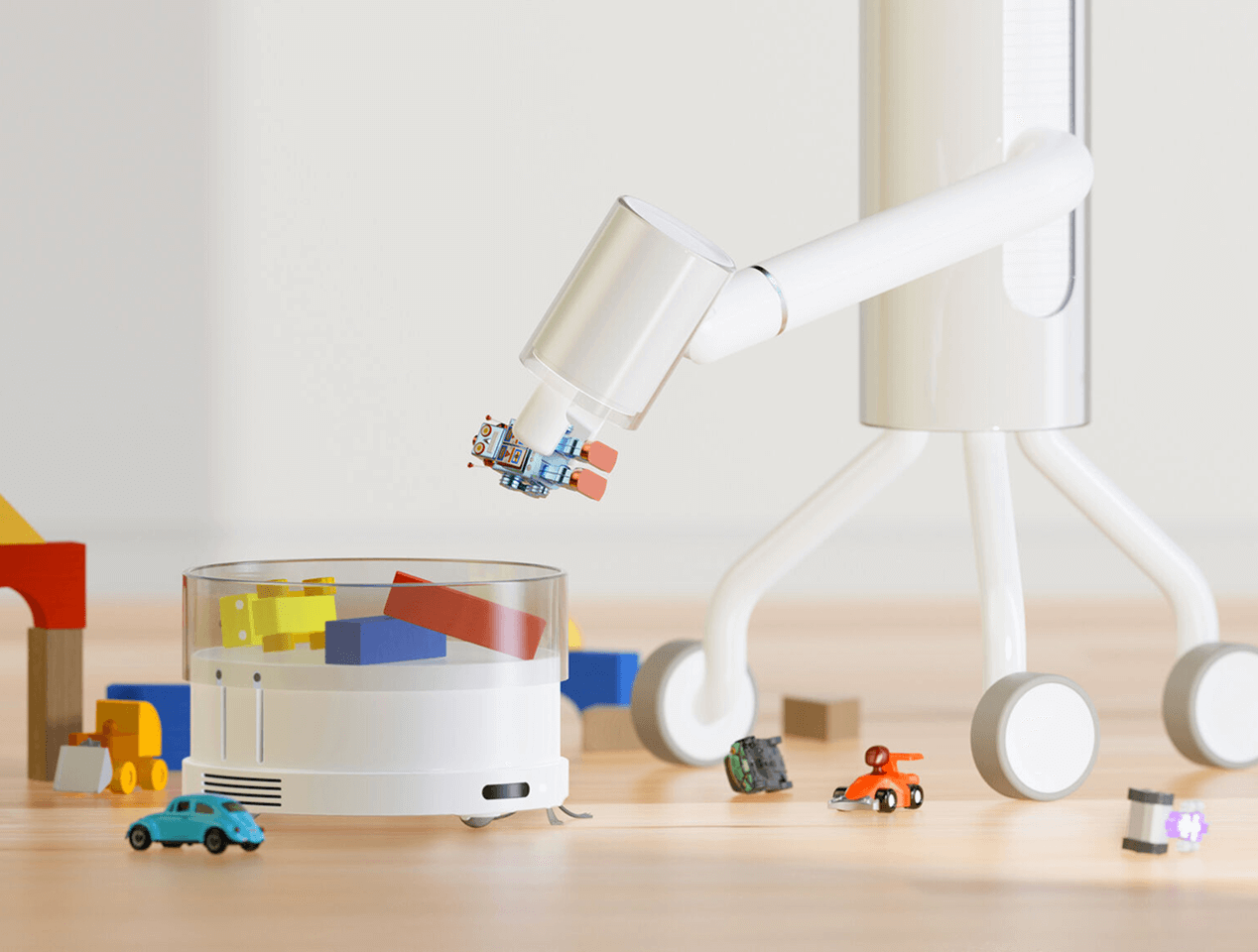
frog created Nome as an internal R&D platform to consider how physical AI should show up in human spaces, shaped by context, culture and everyday behavior. The result is Nome, a domestic robot designed to keep a home in rhythm. It brings together product strategy, industrial design and contextual intelligence into a cohesive physical experience. A context-first approach reveals new roles, interaction models and product opportunities across physical AI.
In physical AI, presence is strategic. Form, posture, responsiveness and spatial behavior set expectations. Nome reflects frog’s belief that adoption is a design problem. Trust, comfort and legibility matter as much as autonomy and intelligence. By combining imagination with deep technical understanding, this work serves both as a lens for imagining new product categories and as a framework that helps organizations move from curiosity about robotics to confidence in bringing them into the world.
How robots occupy, move and express themselves in our spaces shapes the human experience in ways we are only beginning to understand.

The human <br>side of robots
Project Highlights
Challenge
Capability meets adoption
So far, robotics has focused on capability and efficiency, leaving many systems feeling foreign or unsettling in human spaces. This limits adoption just as intelligence becomes ready for everyday use.
Solution
Nome: designed to belong
Nome imagines robotics through a human-centered framework, exploring forms, behaviors and interactions that feel natural in the home while remaining grounded in real technical systems.
Outcome
A new starting point
This work resulted in a platform that enables frog and clients to confidently imagine, prototype and shape next-generation robotic products across industries and contexts.

When Moments Define the Machine
Mapping daily life to guide design strategy
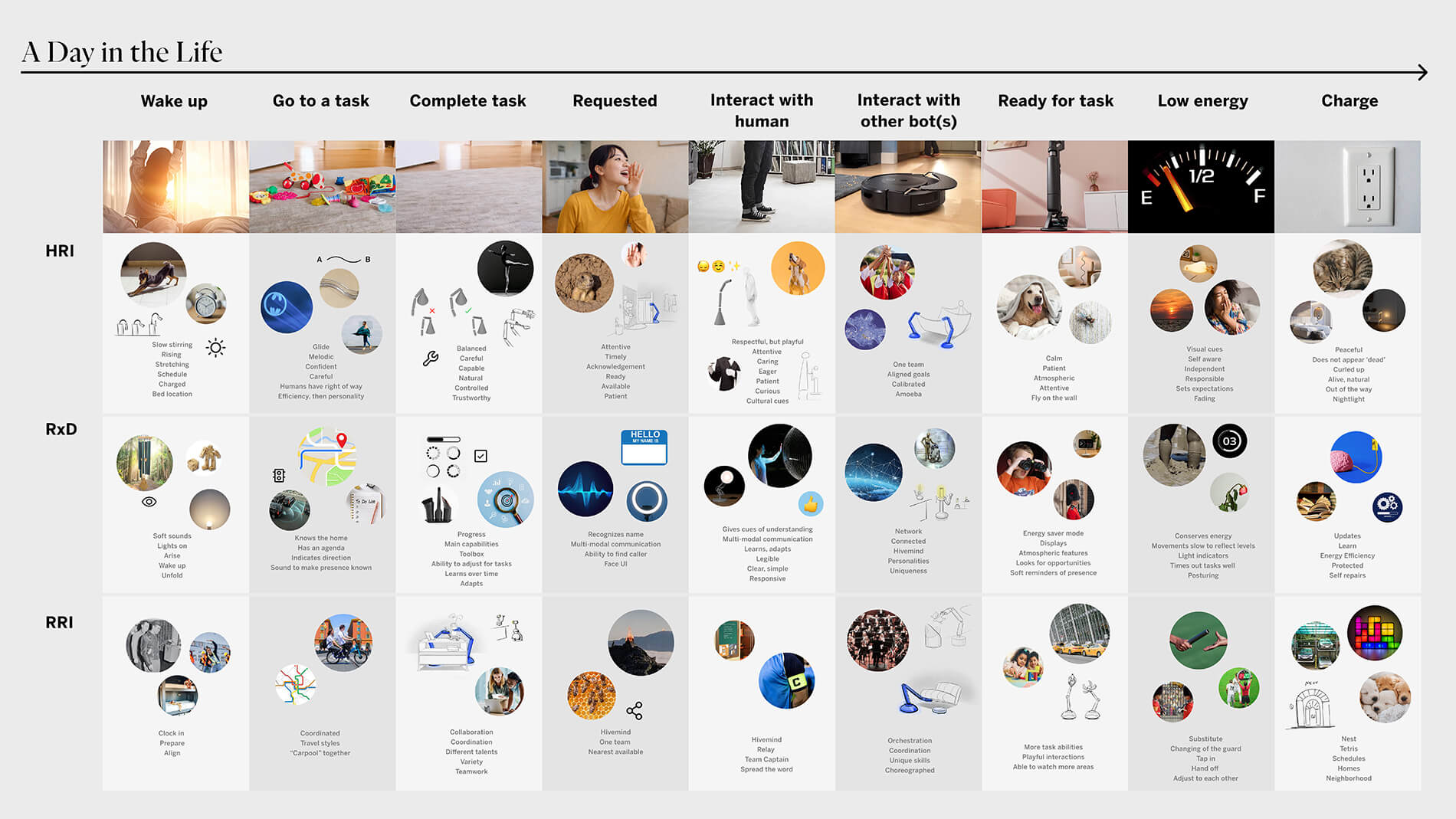
Context determines which use cases feel valuable, what form feels appropriate, and how expressive behavior should be. Designing outward from context allowed new product archetypes, interaction models and opportunities to surface.
We started by looking at the quiet, repetitive actions that sustain life at home. Identifying tidying and related tasks helped us frame Nome as an appliance-adjacent device, designed for familiarity and daily interaction.
Mapping a day in the life around this focus helped us uncover the key moments that define living alongside a robot. This included not just interactions with humans or objects, but also the in-between moments, like charging.
Mapping these moments allowed us to challenge assumptions around Nome’s product architecture. Returning to first principles, we realized that simple wheeled mobility was sufficient and that most tasks could be accomplished with a single arm. Reducing complexity allowed us to define a new product archetype.
Acknowledging these moments informed experience principles that became a compass for designing Nome’s personality, movement and interactions: Design for Context and Meaning; Match Capability with Expression; Design for Natural Interaction; Design for Collaboration; and Automate the Drudgery, Not the Joy. Together, they frame our approach to designing robotics for human spaces.
Nome reflects frog’s belief that adoption is a design problem.
Form sets expectation
Shaping how intent is interpreted and engagement begins
Before a robot speaks or moves, its form communicates and enables. In developing Nome, we grounded its personality and purpose in everyday moments in the home, using context to shape its physical expression and capability. Every element, from body proportions and materiality to the expression of its manipulators, contributes to how it is perceived and the type of relationship it fosters. These decisions reinforced utility, approachability and a sense of domestic belonging.
Posture emerged as a critical design element. Inspired by the sculpture principle of contrapposto, we defined postures that feel quietly engaged and balanced, avoiding positions that feel broken, mechanical or uncomfortable. Drawing connections between the human body and robotic form, we considered weight shift, relaxed poses, center of gravity, and opposing angles to create a sense of life even in stillness. These posture rules informed both static form and the way Nome moves and occupies space.
Our final direction balances the trust and familiarity of furniture and appliances with the expressive awareness of a companion. This synthesis of utility, responsiveness and form led to a visual and emotional language grounded in the home and approachable for the people who share the space. In physical AI, form embodies meaning, shaping expectation, emotional connection and adoption before the first interaction.

Nome gives form to emerging technologies, using human-centered design to transform capability into an approachable presence.
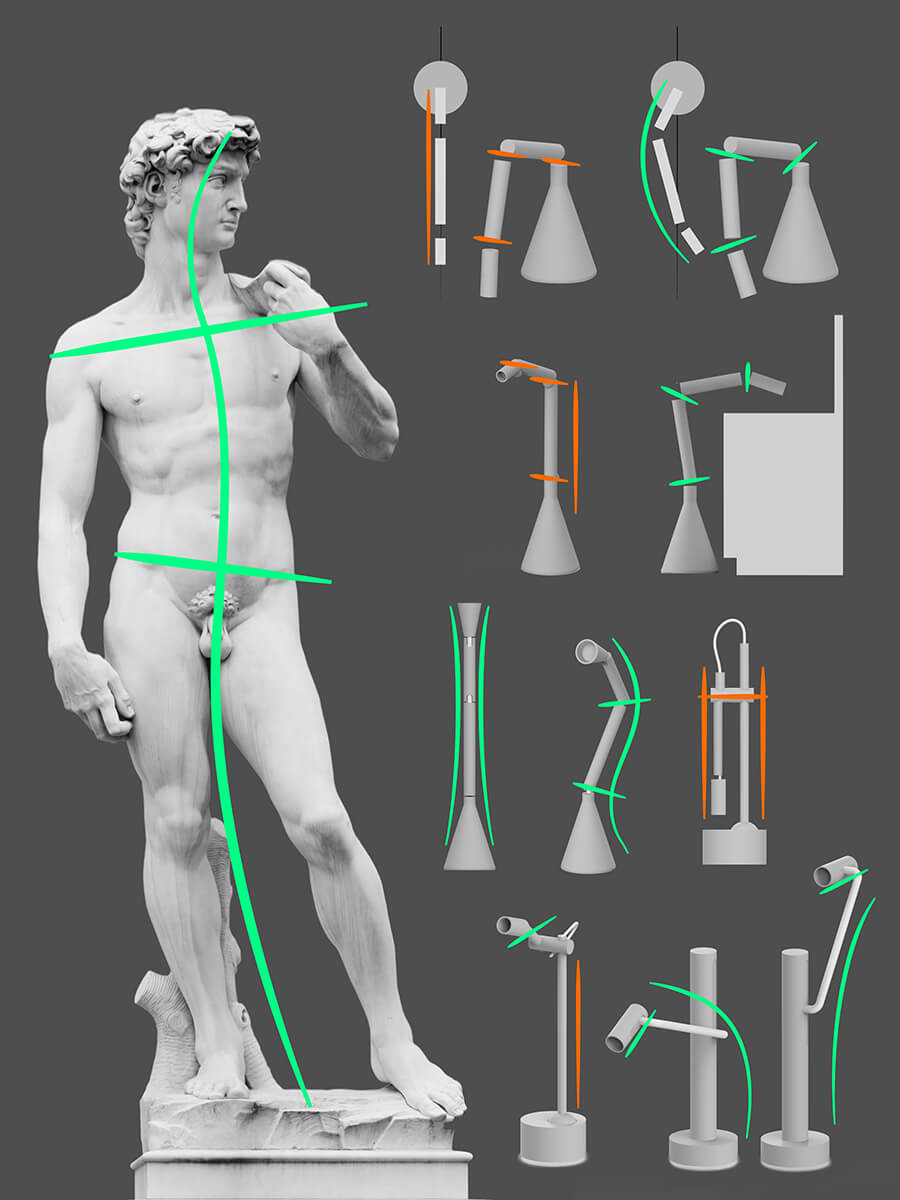
Using contrapposto as a design principle helps robots achieve postures that feel natural, balanced and engaged.
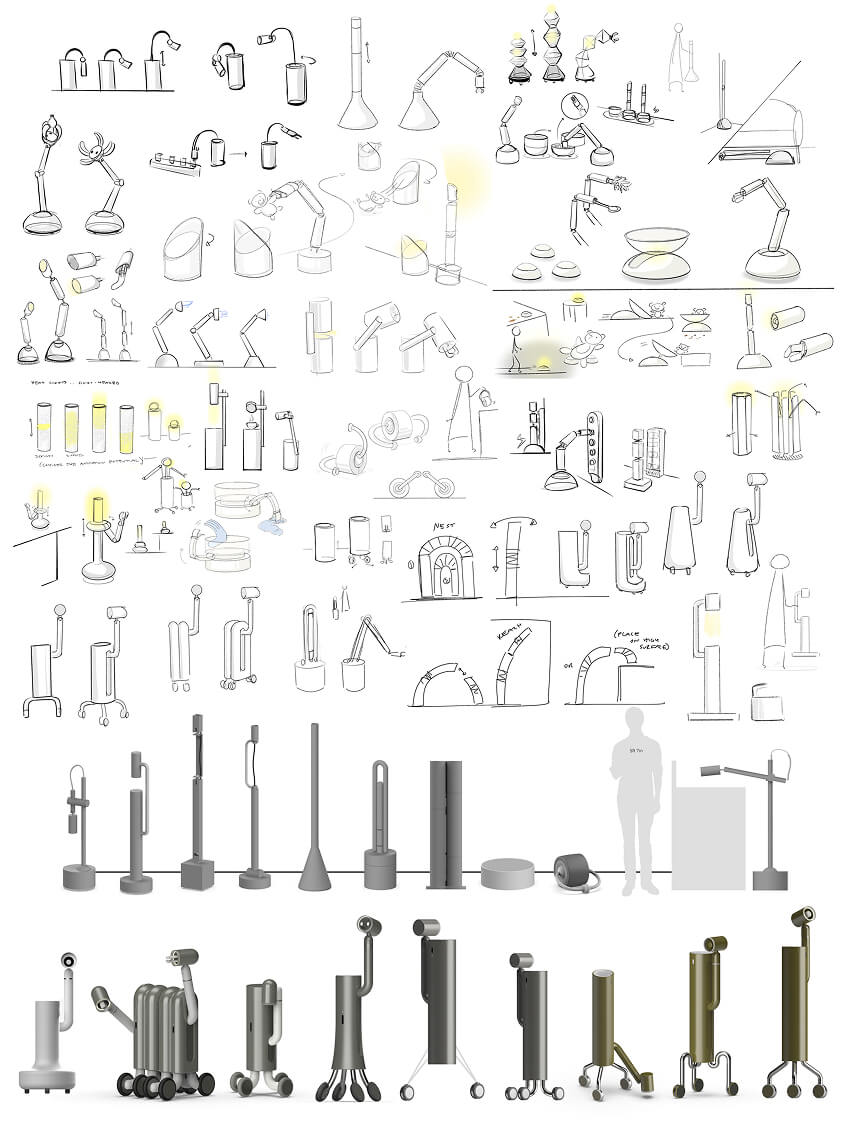
Each iteration moved beyond surface refinement, shaping form, configuration and behavior to define a cohesive strategy aligned to the use case.

Until a concept occupies space at its intended size, it is difficult to understand how it truly feels.
Nome gives form to emerging technologies, using human-centered design to transform capability into an approachable presence.
Each iteration moved beyond surface refinement, shaping form, configuration and behavior to define a cohesive strategy aligned to the use case.
Using contrapposto as a design principle helps robots achieve postures that feel natural, balanced and engaged.
Until a concept occupies space at its intended size, it is difficult to understand how it truly feels.
From interaction to experience
Expanding how we communicate
As natural language interfaces become more common and robotic reasoning improves, interaction with machines can begin to resemble everyday communication. In designing Nome, we explored how that shift could unfold within the rhythms of home life.
We approached interaction across two time horizons. At a systemic level, Nome was designed to treat engagement as a continuous experience shaped by behavior over time. How it initiates interaction, yields attention and resumes activity was carefully considered to ensure it feels supportive rather than intrusive. Rather than optimizing for constant responsiveness, we shaped the system to respect attention, allow interruption and adapt to changing dynamics in the home.
At the human level, interaction moves beyond rigid inputs. Language, gesture and demonstration become primary modes of engagement. Communication is multimodal, shaped not only by voice or text, but by physical presence in space. These decisions shift interaction from issuing commands to establishing shared understanding.
The result is engagement that feels intuitive, adaptable and human, without overwhelming the people who share the space.

Presence in motion
Expressing identity and intent through movement
How a robot moves defines its identity and personality, shaping how it is experienced over time. A robot’s motion signature becomes recognizable from afar, distinct in pace, posture and responsiveness. When designing Nome’s movement, we borrowed principles from animation and character design to intentionally shape expressive, legible behavior. This approach allowed us to define how Nome navigates, approaches, pauses and responds in everyday scenarios.
In robotics, behavior is communication. Form, movement, speed, arcs, positioning, sound and light work together as choreography, signaling awareness, intent and role without demanding attention. These elements do more than express personality; they establish identity and shape how systems are recognized and trusted over time.
To refine this motion language, we developed an interactive VR simulation methodology to explore what it feels like to share space with an active robot. By simulating tasks, navigation and responses to interruption, we translated abstract intent into embodied behavior, aligning experience, engineering decisions and brand expression around a coherent motion signature. The result is a robot whose motion signature aligns with human rhythms—distinct, legible and emotionally resonant—becoming a recognizable expression of its brand.

The larger ecosystem
From standalone machines to orchestrated systems
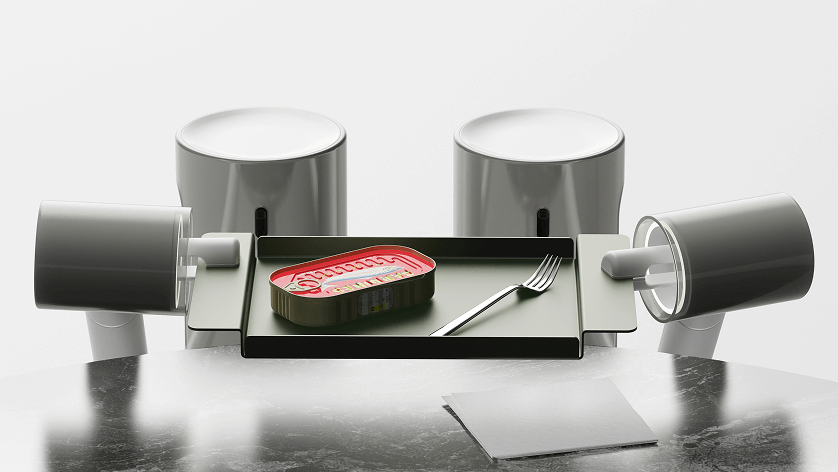
At frog, we see an ecosystem that extends beyond robots alone. It includes connected appliances and smart environmental systems that already shape how our spaces behave. This shifts the focus from individual capability to collective behavior, how systems communicate intent, negotiate space and support human rhythms together.
Nome can operate independently on predefined capabilities, but it was never intended to be limited to a single function. Its capabilities can expand over time, growing alongside humans. When collaborating with other Nomes, robots or smart appliances, more complex tasks become possible.
Over time, this ecosystem can learn, grow and adapt, adding new helpers and capabilities without overwhelming the people who share the space.
As new forms of physical AI are introduced into the home, robots can collaborate in novel ways.

As new forms of physical AI are introduced into the home, robots can collaborate in novel ways.
While one arm is enough for most tasks, Nomes can collaborate for efficiency or to take on more complex tasks.
Designing what we want to live with
Robotics will increasingly share our homes, workplaces and public environments, showing up as machines and enabling next-generation experiences. As AI becomes embodied in objects and systems around us, the challenge shifts from advancing capability to shaping how systems show up in human spaces.
Presence determines whether these technologies feel foreign or familiar. Rooted in context, it emerges through intentional decisions across product definition and design, creating space for new product archetypes and ways of living alongside machines.
Designing robots for human spaces means translating advanced capability into experiences that are coherent, contextual and human. Ultimately, it means designing what we want to live with.

